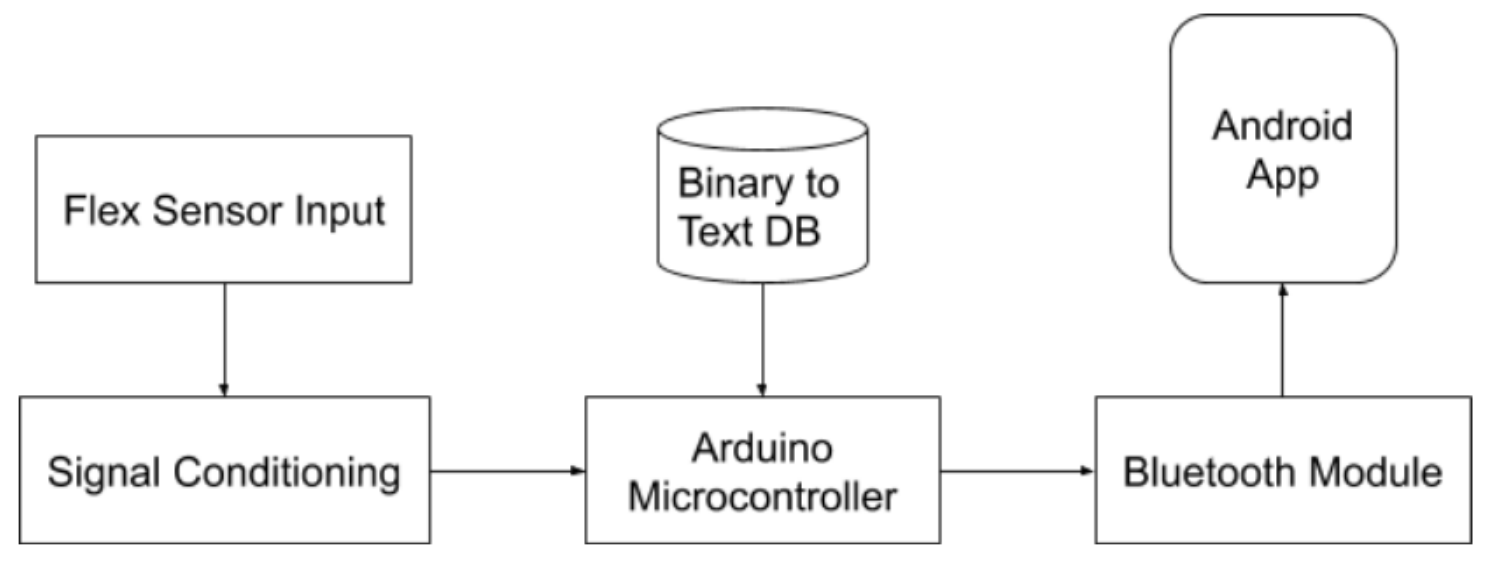
System design
The system architecture was designed as follows:
Prototyping the glove
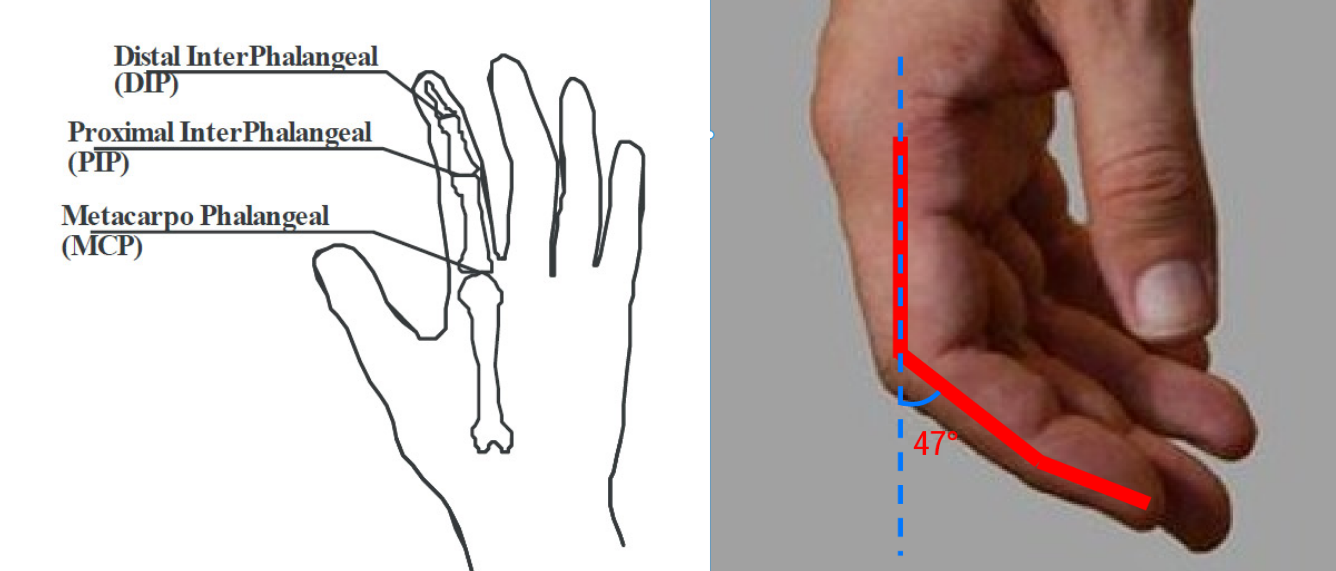
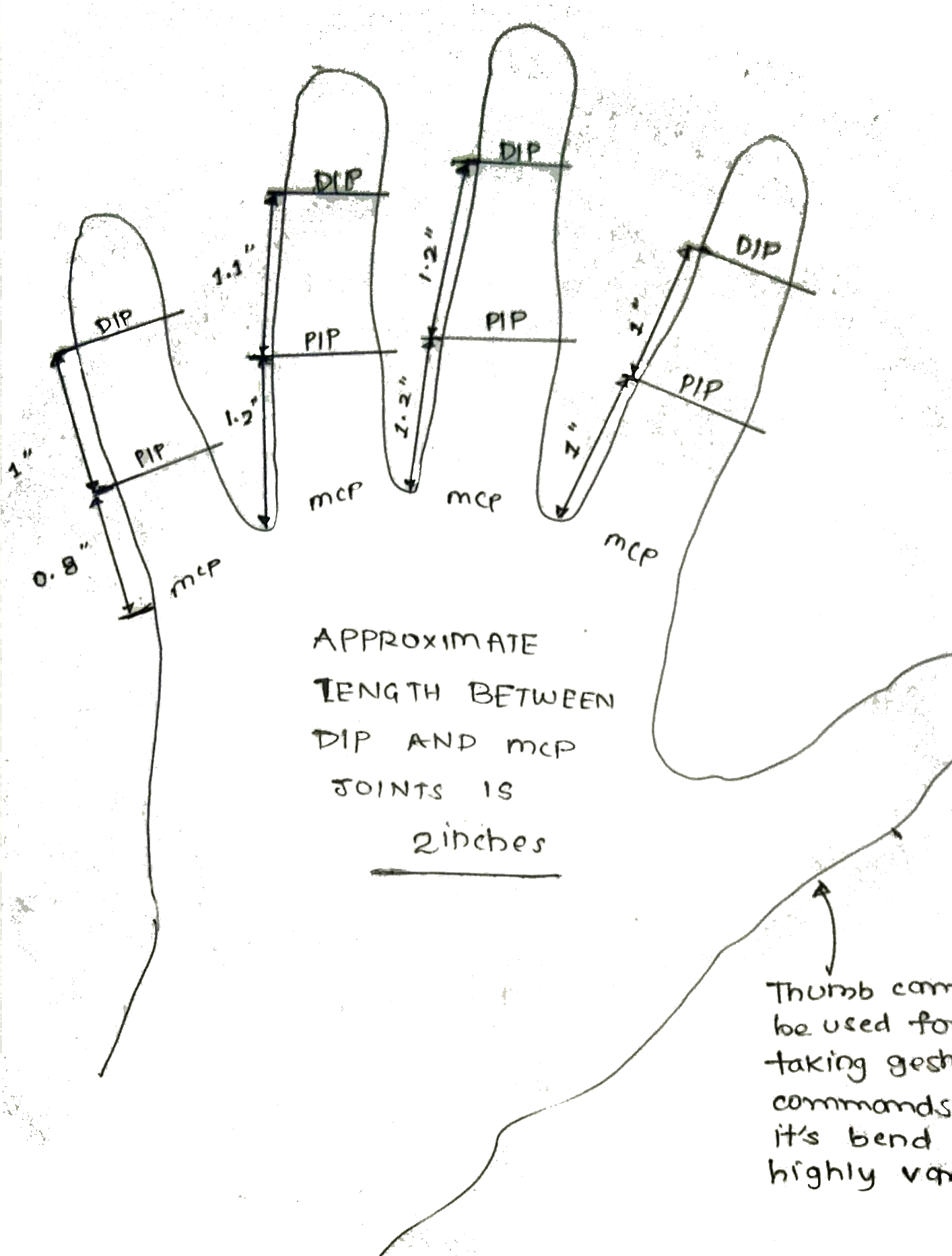
Flex sensors being lightweight and flexible were used in the glove to measure the angle when the finger is bent. Flex sensors are available in different lengths and therefore choosing the correct length is important because if the sensor is long then it will cover the entire finger which would lead to errors in angle calculated as the DIP angle will also be considered. To avoid this, the human finger was studied. I sketched fingers of variable lengths to measure the distance from the end of MCP joint till the start of DIP joints. This area of the finger when covered by the flex sensor would only calculate the PIP angle and give the intended result.
Note: The below diagram is just to explain how the length was calculated. While performing the study, the fingers of the people of different age and gender were considered.
Flex sensors are available in 2 lengths 2.2inches and 4.5inches. From the above observations, we could conclude that a flex sensor of the length of 2.2 inches would be the most effective length to give accurate results. Other components used to prototype the glove are:
- Arduino Uno (ATmega328P)
- Bluetooth Module HC-05
- Connecting wires
Final Prototype
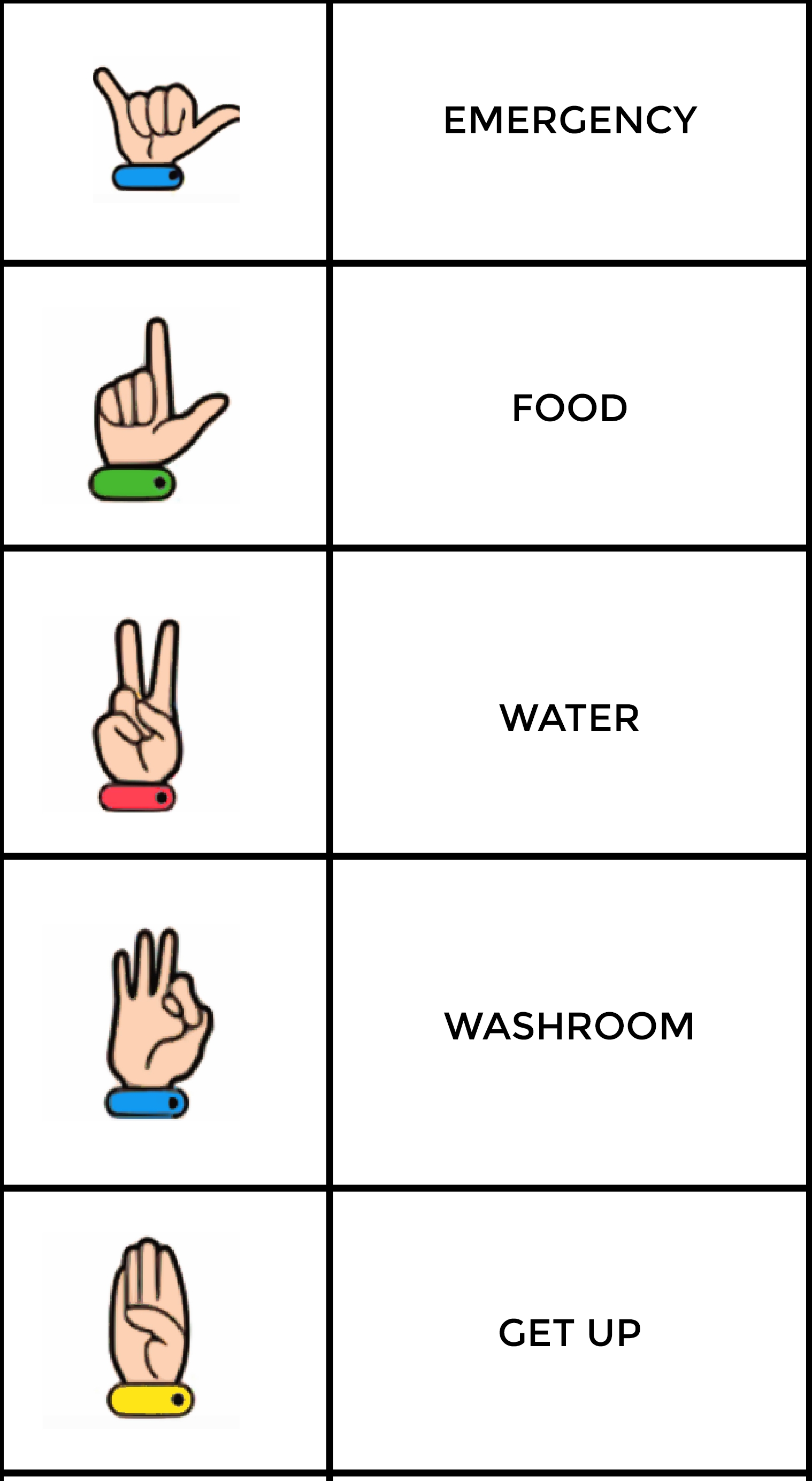
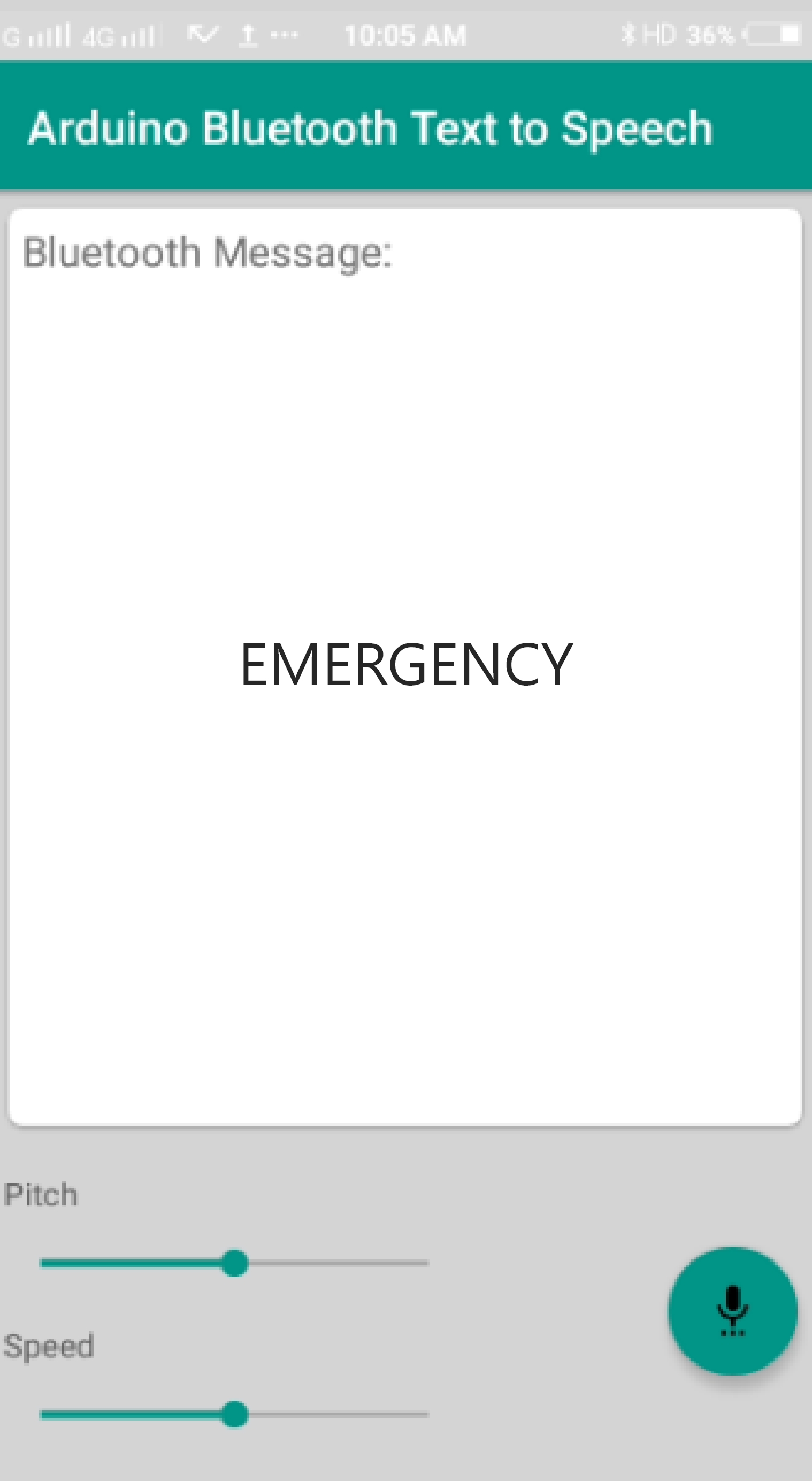
Having designed the system architecture and the connections, we moved ahead to develop a prototype of this system. The prototype was in working condition and was tested on multiple users. It was observed that the patients could easily convey their needs using the gloves and the gesture vs command chart. This improved the overall effectiveness in communication. Also, after a point the patient started remembering the gestures, removing their dependency on the reference chart.